AWOL 版本的 Tina Linux 使用的是 Tina5.0,OpenWrt 升级到了 21.05 版本,相较于商业量产版本的 Tina Linux 新了许多,而且支持更多新软件包。不过可惜的是 MPP 没有移植到 Tina5.0,不过 MPP 使用门槛较高,学习难度大,不是做产品也没必要研究。这里就研究下使用 AWOL 开源版本的 Tina Linux 与 OpenCV 框架开启摄像头拍照捕获视频。
准备开发环境 首先准备一台 Ubuntu 20.04 / Ubuntu 18.04 / Ubuntu 16.04 / Ubuntu 14.04 的虚拟机或实体机,其他系统没有测试过出 BUG 不管。
更新系统,安装基础软件包
sudo apt-get update
安装完成后还需要安装 i386 支持,SDK 有几个打包固件使用的程序是 32 位的,如果不安装就等着 Segment fault 吧。
sudo dpkg --add-architecture i386
下载 AWOL Tina Linux BSP 注册一个 AWOL 账号 下载 SDK 需要使用 AWOL 的账号,前往 https://bbs.aw-ol.com/ 注册一个就行。其中需要账号等级为 LV2,可以去这个帖子:https://bbs.aw-ol.com/topic/4158/share/1 水四条回复就有 LV2 等级了。
安装 repo 管理器 BSP 使用 repo 下载,首先安装 repo ,这里建议使用国内镜像源安装
mkdir -p ~/.bin"${HOME} /.bin:${PATH} " chmod a+rx ~/.bin/repo
请注意这里使用的是临时安装,安装完成后重启终端就没有了,需要再次运行下面的命令才能使用,如何永久安装请自行百度。
PATH="${HOME} /.bin:${PATH} "
安装使用 repo 的过程中会遇到各种错误,请百度解决。repo 是谷歌开发的,repo 的官方服务器是谷歌的服务器,repo 每次运行时需要检查更新然后卡死,这是很正常的情况,所以在国内需要更换镜像源提高下载速度。将如下内容复制到你的~/.bashrc 里
echo export REPO_URL='https://mirrors.bfsu.edu.cn/git/git-repo' >> ~/.bashrcsource ~/.bashrc
如果您使用的是 dash、hash、 zsh 等 shell,请参照 shell 的文档配置。环境变量配置一个 REPO_URL 的地址
配置一下 git 身份认证,设置保存 git 账号密码不用每次都输入。
git config --global credential.helper store
新建文件夹保存 SDK 使用 mkdir 命令新建文件夹,保存之后需要拉取的 SDK,然后 cd 进入到刚才新建的文件夹中。
mkdir tina-v853-opencd tina-v853-open
初始化 repo 仓库 使用 repo init 命令初始化仓库,tina-v853-open 的仓库地址是 https://sdk.aw-ol.com/git_repo/V853Tina_Open/manifest.git 需要执行命令:
repo init -u https://sdk.aw-ol.com/git_repo/V853Tina_Open/manifest.git -b master -m tina-v853-open.xml
拉取 SDK 创建开发环境 repo start devboard-v853-tina-for-awol --all
适配 TinyVision 板子 刚才下载到的 SDK 只支持一个板子,售价 1999 的 V853-Vision 开发板,这里要添加自己的板子的适配。
下载支持包:https://github.com/YuzukiTsuru/YuzukiTsuru.GitHub.io/releases/download/2024-01-21-20240121/tina-bsp-tinyvision.tar.gz
或者可以在:https://github.com/YuzukiHD/TinyVision/tree/main/tina 下载到文件,不过这部分没预先下载软件包到 dl 文件夹所以编译的时候需要手动下载。
放到 SDK 的主目录下
运行解压指令
tar xvf tina-bsp-tinyvision.tar.gz
即可使 Tina SDK 支持 TinyVision 板子
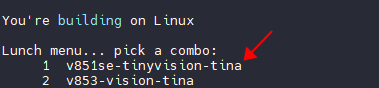
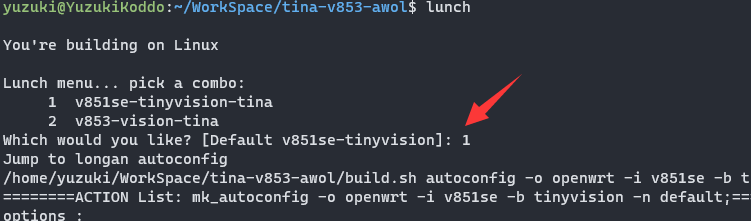
初始化 SDK 环境 每次开发之前都需要初始化 SDK 环境,命令如下
然后按 1 选择 TinyVision
适配 ISP Tina SDK 内置一个 libAWispApi 的包,支持在用户层对接 ISP,但是很可惜这个包没有适配 V85x 系列,这里就需要自行适配。其实适配很简单,SDK 已经提供了 lib 只是没提供编译支持。我们需要加上这个支持。
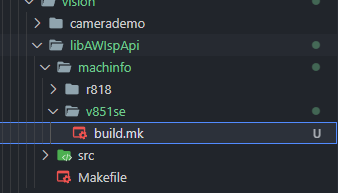
前往 openwrt/package/allwinner/vision/libAWIspApi/machinfo 文件夹中,新建一个文件夹 v851se ,然后新建文件 build.mk 写入如下配置:
对于 v851s,v853 也可以这样操作,然后 m menuconfig 勾选上这个包
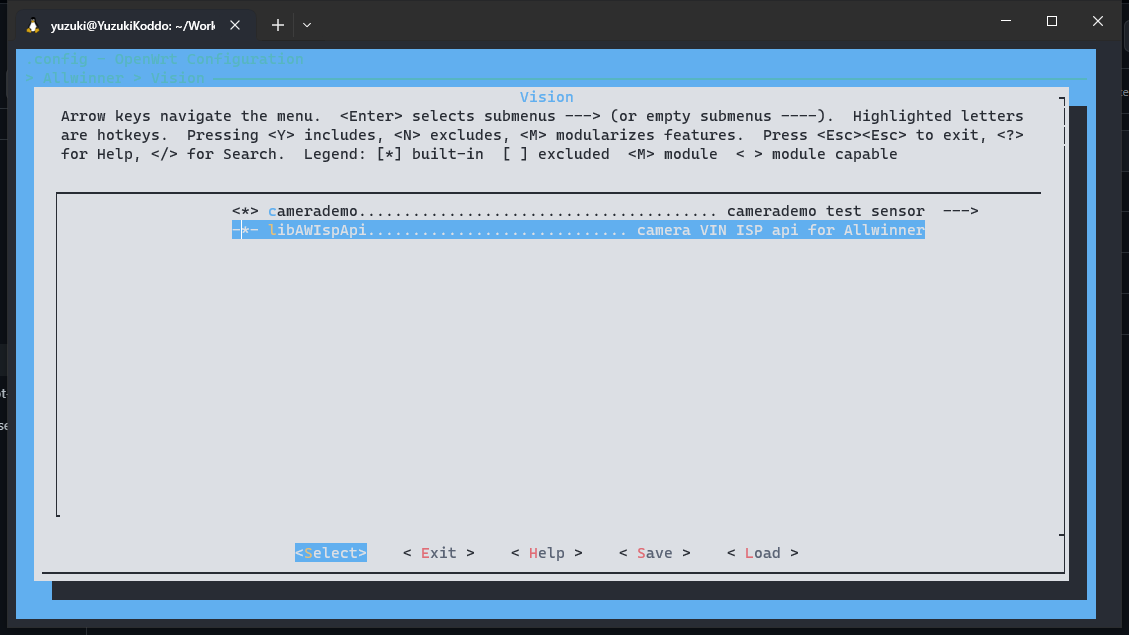
开启 camerademo 测试摄像头 进入 m menuconfig 进入如下页面进行配置。
Allwinner --->
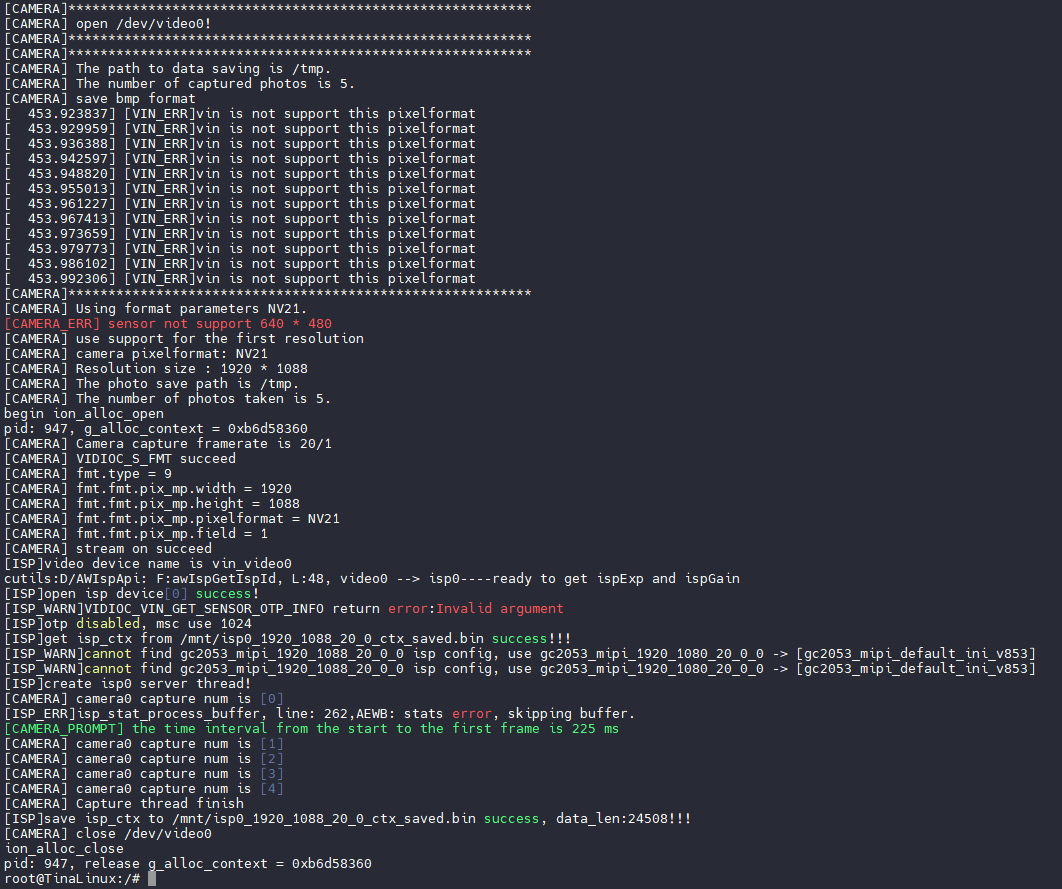
编译系统然后烧录系统,运行命令 camerademo ,可以看到是正常拍摄照片的
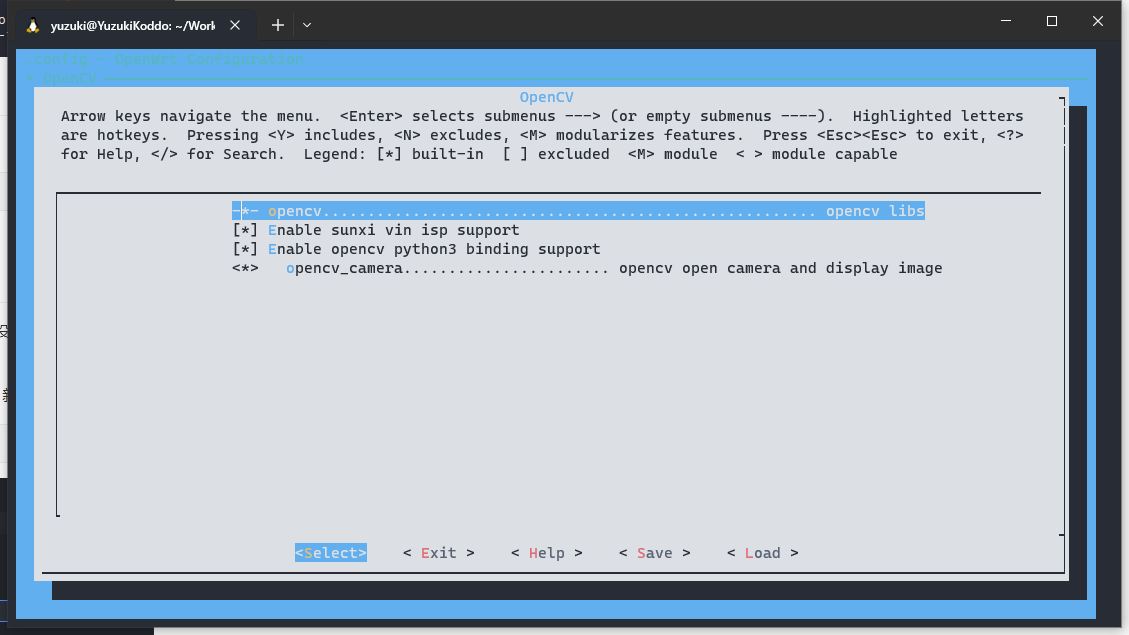
适配 OpenCV 勾选 OpenCV 包 m menuconfig 进入软件包配置,勾选
OpenCV --->
OpenCV 适配过程 本部分的操作已经包含在 tina-bsp-tinyvision.tar.gz 中了,已经适配好了,如果不想了解如何适配 OpenCV 可以直接跳过这部分
OpenCV 的多平面视频捕获支持 一般来说,如果不适配 OpenCV 直接开摄像头,会得到一个报错:
[ 702.464977] [VIN_ERR]video0 has already stream off
这是由于 OpenCV 的 V4L2 实现是使用的 V4L2_CAP_VIDEO_CAPTURE 标准,而 sunxi-vin 驱动的 RAW Sensor 平台使用的是 V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE ,导致了默认 OpenCV 的配置错误。
V4L2_CAP_VIDEO_CAPTURE_MPLANE和V4L2_BUF_TYPE_VIDEO_CAPTURE是 Video4Linux2(V4L2)框架中用于视频捕获的不同类型和能力标志。
V4L2_CAP_VIDEO_CAPTURE_MPLANE: 这个标志指示设备支持多平面(multi-plane)视频捕获。在多平面捕获中,图像数据可以分解成多个平面(planes),每个平面包含不同的颜色分量或者图像数据的不同部分。这种方式可以提高效率和灵活性,尤其适用于处理涉及多个颜色分量或者多个图像通道的视频流。V4L2_BUF_TYPE_VIDEO_CAPTURE: 这个类型表示普通的单平面(single-plane)视频捕获。在单平面捕获中,图像数据以单个平面的形式存储,即所有的颜色分量或者图像数据都保存在一个平面中。
因此,区别在于支持的数据格式和存储方式。V4L2_CAP_VIDEO_CAPTURE_MPLANE表示设备支持多平面视频捕获,而V4L2_BUF_TYPE_VIDEO_CAPTURE表示普通的单平面视频捕获。
这里就需要通过检查capability.capabilities中是否包含V4L2_CAP_VIDEO_CAPTURE标志来确定是否支持普通的视频捕获类型。如果支持,那么将type设置为V4L2_BUF_TYPE_VIDEO_CAPTURE。
如果不支持普通的视频捕获类型,那么通过检查capability.capabilities中是否包含V4L2_CAP_VIDEO_CAPTURE_MPLANE标志来确定是否支持多平面视频捕获类型。如果支持,那么将type设置为V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE。
例如如下修改:
- form.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; - form.fmt.pix.pixelformat = palette; - form.fmt.pix.field = V4L2_FIELD_ANY; - form.fmt.pix.width = width; - form.fmt.pix.height = height; + if (capability.capabilities & V4L2_CAP_VIDEO_CAPTURE) { + form.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; + form.fmt.pix.pixelformat = palette; + form.fmt.pix.field = V4L2_FIELD_NONE; + form.fmt.pix.width = width; + form.fmt.pix.height = height; + } else if (capability.capabilities & V4L2_CAP_VIDEO_CAPTURE_MPLANE) { + form.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE; + form.fmt.pix_mp.width = width; + form.fmt.pix_mp.height = height; + form.fmt.pix_mp.pixelformat = palette; + form.fmt.pix_mp.field = V4L2_FIELD_NONE; + }
这段代码是在设置视频捕获的格式和参数时进行了修改。
原来的代码中,直接设置了form.type为V4L2_BUF_TYPE_VIDEO_CAPTURE,表示使用普通的视频捕获类型。然后设置了其他参数,如像素格式(pixelformat)、帧字段(field)、宽度(width)和高度(height)等。
修改后的代码进行了条件判断,根据设备的能力选择合适的视频捕获类型。如果设备支持普通的视频捕获类型(V4L2_CAP_VIDEO_CAPTURE标志被设置),则使用普通的视频捕获类型并设置相应的参数。如果设备支持多平面视频捕获类型(V4L2_CAP_VIDEO_CAPTURE_MPLANE标志被设置),则使用多平面视频捕获类型并设置相应的参数。
对于普通的视频捕获类型,设置的参数与原来的代码一致,只是将帧字段(field)从V4L2_FIELD_ANY改为V4L2_FIELD_NONE,表示不指定特定的帧字段。
对于多平面视频捕获类型,设置了新的参数,如多平面的宽度(pix_mp.width)、高度(pix_mp.height)、像素格式(pix_mp.pixelformat)和帧字段(pix_mp.field)等。
通过这个修改,可以根据设备的能力选择适当的视频捕获类型,并设置相应的参数,以满足不同设备的要求。
OpenCV 的 ISP 支持 OpenCV 默认不支持开启 RAW Sensor,不过现在需要配置为 OpenCV 开启 RAW Sensor 抓图,然后通过 OpenCV 送图到之前适配的 libAWispApi 库进行 ISP 处理。在这里增加一个函数作为 RAW Sensor 抓图的处理。
#ifdef __USE_VIN_ISP__ bool CvCaptureCAM_V4L::RAWSensor () struct v4l2_control ctrl;struct v4l2_queryctrl qc_ctrl;memset (&ctrl, 0 , sizeof (struct v4l2_control));memset (&qc_ctrl, 0 , sizeof (struct v4l2_queryctrl));if (-1 == ioctl (deviceHandle, VIDIOC_QUERYCTRL, &qc_ctrl)){fprintf (stderr, "V4L2: %s QUERY V4L2_CID_SENSOR_TYPE failed\n" , deviceName.c_str ());return false ;if (-1 == ioctl (deviceHandle, VIDIOC_G_CTRL, &ctrl)) {fprintf (stderr, "V4L2: %s G_CTRL V4L2_CID_SENSOR_TYPE failed\n" , deviceName.c_str ());return false ;return ctrl.value == V4L2_SENSOR_TYPE_RAW;#endif
这段代码的功能是检查V4L2摄像头设备的传感器类型是否为RAW格式。它使用了V4L2的ioctl函数来查询和获取传感器类型信息。具体步骤如下:
定义了两个v4l2_control结构体变量ctrl和qc_ctrl,并初始化为零
将ctrl.id和qc_ctrl.id分别设置为V4L2_CID_SENSOR_TYPE,表示要查询的控制和查询ID
使用ioctl函数的VIDIOC_QUERYCTRL命令来查询传感器类型的控制信息,并将结果保存在qc_ctrl中
如果查询失败(ioctl返回-1),则输出错误信息并返回false
使用ioctl函数的VIDIOC_G_CTRL命令来获取传感器类型的当前值,并将结果保存在ctrl中
如果获取失败(ioctl返回-1),则输出错误信息并返回false
检查ctrl.value是否等于V4L2_SENSOR_TYPE_RAW,如果相等,则返回true,表示传感器类型为RAW格式;否则返回false
并且使用了#ifdef __USE_VIN_ISP__指令。这表示只有在定义了__USE_VIN_ISP__宏时,才会编译和执行这段代码
然后在 OpenCV 的 bool CvCaptureCAM_V4L::streaming(bool startStream) 捕获流函数中添加 ISP 处理
#ifdef __USE_VIN_ISP__ RAWSensor ();if (startStream && RawSensor) {int VideoIndex = -1 ;sscanf (deviceName.c_str (), "/dev/video%d" , &VideoIndex);CreateAWIspApi ();-1 ;ispGetIspId (VideoIndex);if (IspId >= 0 )ispStart (IspId);else if (RawSensor && IspId >= 0 && IspPort) {ispStop (IspId);DestroyAWIspApi (IspPort);NULL ;-1 ;#endif
这段代码是在条件编译__USE_VIN_ISP__的情况下进行了修改。
首先,它创建了一个RawSensor对象,并检查startStream和RawSensor是否为真。如果满足条件,接下来会解析设备名称字符串,提取出视频索引号。
然后,它调用CreateAWIspApi()函数创建了一个AWIspApi对象,并初始化变量IspId为-1。接着,通过调用ispGetIspId()函数获取指定视频索引号对应的ISP ID,并将其赋值给IspId。如果IspId大于等于0,表示获取到有效的ISP ID,就调用ispStart()函数启动ISP流处理。
如果不满足第一个条件,即startStream为假或者没有RawSensor对象,那么会检查IspId是否大于等于0并且IspPort对象是否存在。如果满足这些条件,说明之前已经启动了ISP流处理,此时会调用ispStop()函数停止ISP流处理,并销毁IspPort对象。最后,将IspPort置为空指针,将IspId重置为-1。
这段代码主要用于控制图像信号处理(ISP)的启动和停止。根据条件的不同,可以选择在开始视频流捕获时启动ISP流处理,或者在停止视频流捕获时停止ISP流处理,以便对视频数据进行处理和增强。
至于其他包括编译脚本的修改,全局变量定义等操作,可以参考补丁文件 openwrt/package/thirdparty/vision/opencv/patches/0004-support-sunxi-vin-camera.patch
使用 OpenCV 捕获摄像头并且输出到屏幕上 快速测试 这个 DEMO 也已经包含在 tina-bsp-tinyvision.tar.gz 中了,可以快速测试这个 DEMO
运行 m menuconfig
OpenCV --->
源码详解 编写一个程序,使用 OpenCV 捕获摄像头输出并且显示到屏幕上,程序如下:
#include <fcntl.h> #include <fstream> #include <iostream> #include <linux/fb.h> #include <signal.h> #include <stdint.h> #include <sys/ioctl.h> #include <opencv2/opencv.hpp> #define DISPLAY_X 240 #define DISPLAY_Y 240 static cv::VideoCapture cap;struct framebuffer_info {uint32_t bits_per_pixel;uint32_t xres_virtual;struct framebuffer_info get_framebuffer_info (const char * framebuffer_device_path)struct framebuffer_info info;struct fb_var_screeninfo screen_info;int fd = -1 ;open (framebuffer_device_path, O_RDWR);if (fd >= 0 ) {if (!ioctl (fd, FBIOGET_VSCREENINFO, &screen_info)) {return info;static void terminate (int sig_no) printf ("Got signal %d, exiting ...\n" , sig_no);release ();exit (1 );static void install_sig_handler (void ) signal (SIGBUS, terminate);signal (SIGFPE, terminate);signal (SIGHUP, terminate);signal (SIGILL, terminate);signal (SIGINT, terminate);signal (SIGIOT, terminate);signal (SIGPIPE, terminate);signal (SIGQUIT, terminate);signal (SIGSEGV, terminate);signal (SIGSYS, terminate);signal (SIGTERM, terminate);signal (SIGTRAP, terminate);signal (SIGUSR1, terminate);signal (SIGUSR2, terminate);int main (int , char **) const int frame_width = 480 ;const int frame_height = 480 ;const int frame_rate = 30 ;install_sig_handler ();get_framebuffer_info ("/dev/fb0" );open (0 );if (!cap.isOpened ()) {"Could not open video device." << std::endl;return 1 ;"Successfully opened video device." << std::endl;set (cv::CAP_PROP_FRAME_WIDTH, frame_width);set (cv::CAP_PROP_FRAME_HEIGHT, frame_height);set (cv::CAP_PROP_FPS, frame_rate);std::ofstream ofs ("/dev/fb0" ) ;while (true ) {if (frame.depth () != CV_8U) {"Not 8 bits per pixel and channel." << std::endl;else if (frame.channels () != 3 ) {"Not 3 channels." << std::endl;else {transpose (frame, frame);flip (frame, frame, 0 );resize (frame, frame, cv::Size (DISPLAY_X, DISPLAY_Y));int framebuffer_width = fb_info.xres_virtual;int framebuffer_depth = fb_info.bits_per_pixel;size ();switch (framebuffer_depth) {case 16 :cvtColor (frame, framebuffer_compat, cv::COLOR_BGR2BGR565);for (int y = 0 ; y < frame_size.height; y++) {seekp (y * framebuffer_width * 2 );write (reinterpret_cast <char *>(framebuffer_compat.ptr (y)), frame_size.width * 2 );break ;case 32 : {split (frame, split_bgr);push_back (cv::Mat (frame_size, CV_8UC1, cv::Scalar (255 )));merge (split_bgr, framebuffer_compat);for (int y = 0 ; y < frame_size.height; y++) {seekp (y * framebuffer_width * 4 );write (reinterpret_cast <char *>(framebuffer_compat.ptr (y)), frame_size.width * 4 );break ;default :"Unsupported depth of framebuffer." << std::endl;
第一部分,处理 frame_buffer 信息:
#include <fcntl.h> #include <fstream> #include <iostream> #include <linux/fb.h> #include <signal.h> #include <stdint.h> #include <sys/ioctl.h> #include <opencv2/opencv.hpp> #define DISPLAY_X 240 #define DISPLAY_Y 240 static cv::VideoCapture cap; struct framebuffer_info {uint32_t bits_per_pixel; uint32_t xres_virtual; struct framebuffer_info get_framebuffer_info (const char * framebuffer_device_path)struct framebuffer_info info;struct fb_var_screeninfo screen_info;int fd = -1 ;open (framebuffer_device_path, O_RDWR);if (fd >= 0 ) {if (!ioctl (fd, FBIOGET_VSCREENINFO, &screen_info)) {return info;
这段代码定义了一些常量、全局变量以及两个函数,并给出了相应的注释说明。具体注释如下:
#define DISPLAY_X 240:定义显示屏的宽度为240。#define DISPLAY_Y 240:定义显示屏的高度为240。static cv::VideoCapture cap;:定义一个静态的OpenCV视频流捕获对象,用于捕获视频流。struct framebuffer_info:定义了一个帧缓冲信息的结构体。
uint32_t bits_per_pixel:每个像素的位数。uint32_t xres_virtual:虚拟屏幕的宽度。
struct framebuffer_info get_framebuffer_info(const char* framebuffer_device_path):获取帧缓冲信息的函数。
const char* framebuffer_device_path:帧缓冲设备文件的路径。int fd = -1;:初始化文件描述符为-1。fd = open(framebuffer_device_path, O_RDWR);:打开帧缓冲设备文件,并将文件描述符保存在变量fd中。if (fd >= 0):检查文件是否成功打开。if (!ioctl(fd, FBIOGET_VSCREENINFO, &screen_info)):通过ioctl获取屏幕信息,并将信息保存在变量screen_info中。
FBIOGET_VSCREENINFO:控制命令,用于获取屏幕信息。&screen_info:屏幕信息结构体的指针。
info.xres_virtual = screen_info.xres_virtual;:将屏幕的虚拟宽度保存在帧缓冲信息结构体的字段xres_virtual中。info.bits_per_pixel = screen_info.bits_per_pixel;:将每个像素的位数保存在帧缓冲信息结构体的字段bits_per_pixel中。return info;:返回帧缓冲信息结构体。
第二部分,注册信号处理函数,用于 ctrl-c 之后关闭摄像头,防止下一次使用摄像头出现摄像头仍被占用的情况。
static void terminate (int sig_no) printf ("Got signal %d, exiting ...\n" , sig_no);release ();exit (1 );static void install_sig_handler (void ) signal (SIGBUS, terminate); signal (SIGFPE, terminate); signal (SIGHUP, terminate); signal (SIGILL, terminate); signal (SIGINT, terminate); signal (SIGIOT, terminate); signal (SIGPIPE, terminate); signal (SIGQUIT, terminate); signal (SIGSEGV, terminate); signal (SIGSYS, terminate); signal (SIGTERM, terminate); signal (SIGTRAP, terminate); signal (SIGUSR1, terminate); signal (SIGUSR2, terminate);
这段代码定义了两个函数,并给出了相应的注释说明。具体注释如下:
static void terminate(int sig_no):信号处理函数。
int sig_no:接收到的信号编号。printf("Got signal %d, exiting ...\n", sig_no);:打印接收到的信号编号。cap.release();:释放视频流捕获对象。exit(1);:退出程序。
static void install_sig_handler(void):安装信号处理函数。
signal(SIGBUS, terminate);:为SIGBUS信号安装信号处理函数。signal(SIGFPE, terminate);:为SIGFPE信号安装信号处理函数。signal(SIGHUP, terminate);:为SIGHUP信号安装信号处理函数。signal(SIGILL, terminate);:为SIGILL信号安装信号处理函数。signal(SIGINT, terminate);:为SIGINT信号安装信号处理函数。signal(SIGIOT, terminate);:为SIGIOT信号安装信号处理函数。signal(SIGPIPE, terminate);:为SIGPIPE信号安装信号处理函数。signal(SIGQUIT, terminate);:为SIGQUIT信号安装信号处理函数。signal(SIGSEGV, terminate);:为SIGSEGV信号安装信号处理函数。signal(SIGSYS, terminate);:为SIGSYS信号安装信号处理函数。signal(SIGTERM, terminate);:为SIGTERM信号安装信号处理函数。signal(SIGTRAP, terminate);:为SIGTRAP信号安装信号处理函数。signal(SIGUSR1, terminate);:为SIGUSR1信号安装信号处理函数。signal(SIGUSR2, terminate);:为SIGUSR2信号安装信号处理函数。
这段代码的功能是安装信号处理函数,用于捕获和处理不同类型的信号。当程序接收到指定的信号时,会调用terminate函数进行处理。
具体而言,terminate函数会打印接收到的信号编号,并释放视频流捕获对象cap,然后调用exit(1)退出程序。
install_sig_handler函数用于为多个信号注册同一个信号处理函数terminate,使得当这些信号触发时,都会执行相同的处理逻辑。
第三部分,主函数:
int main (int , char **) const int frame_width = 480 ;const int frame_height = 480 ;const int frame_rate = 30 ;install_sig_handler (); get_framebuffer_info ("/dev/fb0" ); open (0 ); if (!cap.isOpened ()) {"Could not open video device." << std::endl;return 1 ;"Successfully opened video device." << std::endl;set (cv::CAP_PROP_FRAME_WIDTH, frame_width);set (cv::CAP_PROP_FRAME_HEIGHT, frame_height);set (cv::CAP_PROP_FPS, frame_rate);std::ofstream ofs ("/dev/fb0" ) ; while (true ) {if (frame.depth () != CV_8U) { "Not 8 bits per pixel and channel." << std::endl;else if (frame.channels () != 3 ) { "Not 3 channels." << std::endl;else {transpose (frame, frame); flip (frame, frame, 0 ); resize (frame, frame, cv::Size (DISPLAY_X, DISPLAY_Y)); int framebuffer_width = fb_info.xres_virtual;int framebuffer_depth = fb_info.bits_per_pixel;size ();switch (framebuffer_depth) {case 16 :cvtColor (frame, framebuffer_compat, cv::COLOR_BGR2BGR565);for (int y = 0 ; y < frame_size.height; y++) {seekp (y * framebuffer_width * 2 );write (reinterpret_cast <char *>(framebuffer_compat.ptr (y)), frame_size.width * 2 );break ;case 32 : {split (frame, split_bgr);push_back (cv::Mat (frame_size, CV_8UC1, cv::Scalar (255 )));merge (split_bgr, framebuffer_compat);for (int y = 0 ; y < frame_size.height; y++) {seekp (y * framebuffer_width * 4 );write (reinterpret_cast <char *>(framebuffer_compat.ptr (y)), frame_size.width * 4 );break ;default :"Unsupported depth of framebuffer." << std::endl;return 0 ;
这段代码主要实现了从摄像头获取图像并将其显示在帧缓冲区中。具体流程如下:
定义了常量frame_width、frame_height和frame_rate表示图像的宽度、高度和帧率。
调用install_sig_handler()函数安装信号处理函数。
调用get_framebuffer_info("/dev/fb0")函数获取帧缓冲区信息。
调用cap.open(0)打开摄像头,并进行错误检查。
调用cap.set()函数设置摄像头的参数。
调用std::ofstream ofs("/dev/fb0")打开帧缓冲区。
循环读取摄像头的每一帧图像,对其进行转置、翻转、缩放等操作,然后将其写入帧缓冲区中。
如果读取的图像不是8位每通道像素或者不是3通道,则会输出错误信息。如果帧缓冲区的深度不受支持,则也会输出错误信息。
使用 Python3 操作 OpenCV 勾选 OpenCV-Python3 包 m menuconfig 进入软件包配置,勾选
OpenCV --->
然后编译固件即可,请注意 Python3 编译非常慢,需要耐心等待下。
编写一个 Python 脚本,执行上面的相同操作
import cv2import numpy as np240 240 480 480 30 0 ) if not cap.isOpened():print ("Could not open video device." )1 )print ("Successfully opened video device." )set (cv2.CAP_PROP_FRAME_WIDTH, frame_width)set (cv2.CAP_PROP_FRAME_HEIGHT, frame_height)set (cv2.CAP_PROP_FPS, frame_rate)open ("/dev/fb0" , "wb" ) while True :if frame.dtype != np.uint8 or frame.ndim != 3 :print ("Not 8 bits per pixel and channel." )elif frame.shape[2 ] != 3 :print ("Not 3 channels." )else :0 ) open ("/sys/class/graphics/fb0/bits_per_pixel" , "r" )int (_.read()[:2 ])if framebuffer_depth == 16 :for y in range (frame_size[0 ]):2 )elif framebuffer_depth == 32 :0 ], frame_size[1 ]), 255 , dtype=np.uint8))for y in range (frame_size[0 ]):4 )else :print ("Unsupported depth of framebuffer." )
编译系统 初始化 SDK 环境。
然后就是编译 SDK 输出固件
如果出现错误,请再次运行
以单线程编译解决依赖关系,并且输出全部编译 LOG 方便排查错误。
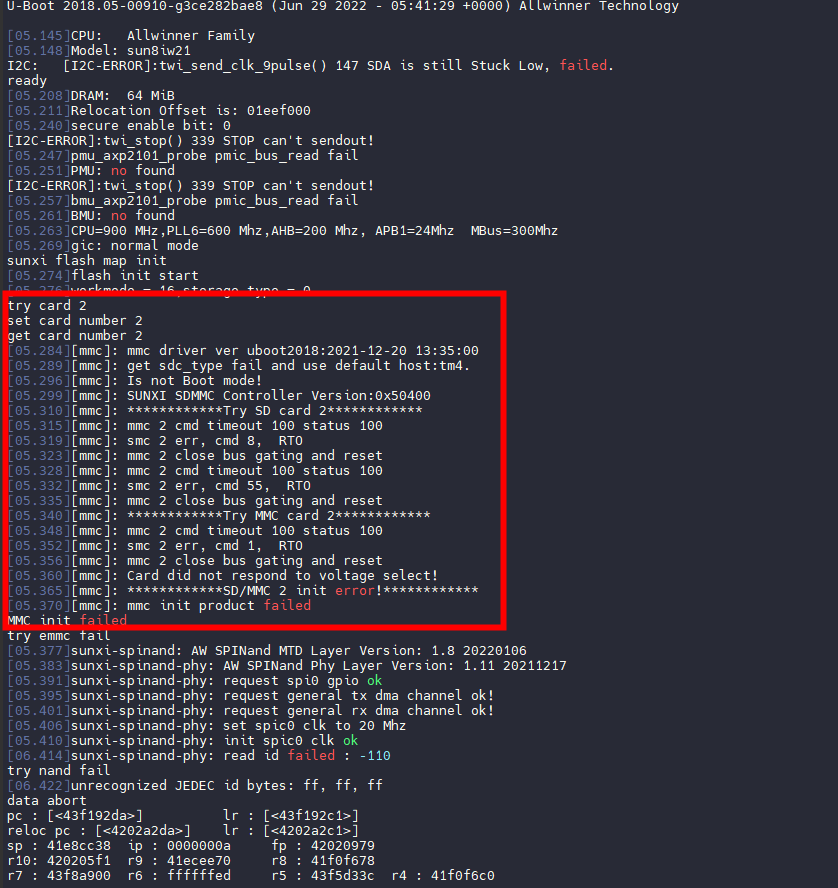
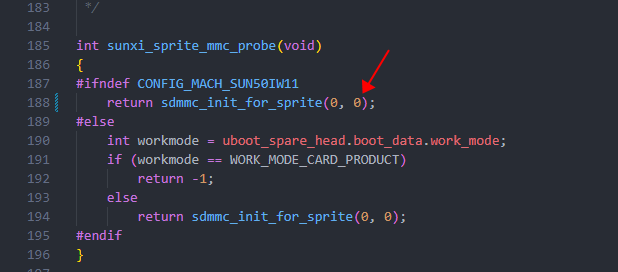
线刷固件 修改 U-boot 支持线刷固件 U-Boot 默认配置的是使用 SDC2 也就是 TinyVision 的 SD-NAND 刷写固件。同时也支持使用 SDC0 也就是 TF 卡烧写固件,但是需要手动配置一下 U-Boot。否则会出现如下问题,U-Boot 去初始化不存在的 SD NAND 导致刷不进系统。
前往文件夹 brandy/brandy-2.0/u-boot-2018/drivers/sunxi_flash/mmc/sdmmc.c
找到第 188 行,将 return sdmmc_init_for_sprite(0, 2); 修改为 return sdmmc_init_for_sprite(0, 0);
修改后需要重新编译固件。插入空白的 TF 卡,如果不是空白的 TF 卡可能出现芯片不进入烧录模式。
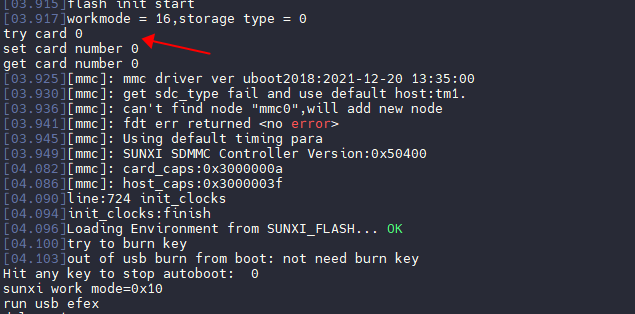
出现 try card 0 开始下载到 TF 卡内
 微信
微信
 支付宝
支付宝